Voedingen
Verlichting
Om de vele huizen te kunnen verlichten, heb ik een aparte voeding ontworpen ten einde de trein transformatoren te ontlasten. De lampjes in de huizen zijn eenvoudige fietslampjes (6 volt, 50 mA) en zijn per twee of per drie in serie geschakeld. Daarvoor zijn drie transformatoren aangeschaft: twee van 12V/2A en één van 18V/2A. Hiervoor is een eenvoudige behuizing met beveiliging gebouwd (zie onderstaande foto's).

De huizen worden per twee of drie geschakeld vanaf het bedieningspaneel. Hiervoor is een simpel paneel met enkelpolige omschakelaars gebouwd.
Digitale voeding
De voeding voor de digitale apparaten (en een deel van de verlichting) is door mijzelf gemaakt gebaseerd op en geïnspireerd door het ontwerp en het voorbeeld van Huib Maaskant (Project Waldberg). Het verschil met zijn ontwerp is, dat ik voor mijn N-baan een geringer vermogen nodig heb dan hij voor zijn H0-baan. Ik heb dus gekozen voor een 4-voudige voeding met een vermogen van 40 VA per sectie. Voor de rest is het een exacte kopie.
De gekozen transformator is een ringkern van Amplimo, modelnummer 58013. De rest van de onderdelen is of van Conrad betrokken of van de lokale leverancier. Voorzichtig met de bouw, je werkt wel met 220 Volt.
Tot nu toe voldoet dit ontwerp naar volle tevredenheid. Zoals U elders kunt lezen, rijd ik met maximaal 14 treinen en daarvoor is één van de 4 secties voldoende. Op een tweede sectie brandt de straatverlichting: momenteel zo'n 40 lantaarns die gezamenlijk ongeveer 1 A (gemeten) consumeren. Een derde sectie verzorgt de voeding van wissels, ontkoppelrails en seinen. De vierde sectie is tot nu toe onbenut.
Regelbare voeding
Bovenstaand een foto van het totale energiecentrum van de modelbaan. Van boven naar beneden: de verlichtingsvoeding zoals beschreven aan het begin van dit hoofdstuk, de digitale voeding en een regelbare voeding die ik gebruik voor het testen van schakelingen (uit: Meetinstrumenten voor Zelfbouw, Muiderkring).
Intellibox
Na lang beraad heb ik in 2001 toch maar besloten om over te schakelen naar digitaal bedrijf. De totale baan bestaat uit 67 blokken, elk daarvan is weer onderverdeeld in 3 of 4 secties (onder het motto beter mee verlegen dan om verlegen). De interface met de computer loopt via de Intellibox (Uhlenbrock). De bezetmelding van de blokken wordt verzorgd met Viessmann 5233 decoders en BMD16-SD, zoals al eerder gemeld, via de S88 bus.
Na 14 jaar heeft mijn Intellibox II de geest gegeven. Op een avond verscheen tijdens het rijden plotseling de mededeling: apparaat oververhit en daarna: vreemde spannning gedetecteerd en tenslotte een zwart scherm. Na het een en ander proberen, bleek de IB overleden te zijn. Ik had hem nog voor reparatie op kunnen sturen, maar aangezien ook de draaiknoppen niet meer foutloos functioneerden en het aantal spontane resets me langzamerhand danig de keel uit begon te hangen, heb ik na overleg met mijn vrouw toch maar besloten om een nieuwe IB II aan te schaffen.
Uiteindelijk ben ik nog best wel veel tijd kwijt geraakt aan het opzetten van de nieuwe Intellibox. Allereerst de handleiding helemaal doorgenomen om te zien wat er allemaal vernieuwd is. Daarna de actieve locomotieven ingevoerd. En allereerst getest of die wilden rijden. Dat lukte. Toen was de uitdaging om Koploper weer aan de praat te krijgen. Dat heeft me een avond gekost en uiteindelijk op het Koploperforum de oplossing gevonden. Je moet de Intellibox niet als Intellibox bij Koploper aanmelden maar als Loconet. Met een baudrate van 115200 (instellen bij Koploper, in de Interface van de IB en bij de systeeminstellingen van de COM-poort). Dat was echter nog niet genoeg, want toen bleek de USB driver niet goed te werken, dus de nieuwste voor Windows 10 van de Uhlenbrock site gedownload. En dan moet je ook nog bij de knop speciaal digitaalsysteem (instellingen per database, tab algemeen-1) de keuze voor specifiek Intellibox maken. Dat kostte even voor ik die gevonden had. Maar daarmee was het grootste probleem opgelost, er was in ieder geval weer communicatie tussen Koploper en de IB. Alles leek te werken, alleen de MARDEC niet. Het bleek dat Loconet de COM4 poort had geclaimd, waar tot nu toe de MARDEC op zat. Dus die opnieuw geinstalleerd naar COM5 en daarmee werkte alles weer. Tenslotte moesten een aantal treinen nog beter afgeregeld worden. Er zijn nog enige problemen met de multi-tractie locomotieven, maar verder lijkt alles te werken.
Koploper
Vanzelfsprekend wordt de besturing van de baan weer uitbesteed aan Koploper. Inmiddels is Koploper versie 9 buildnummer 4 in gebruik. Bij Modelbaan Churwalden heb ik hier goede ervaringen mee opgedaan, dus dat was de reden om weer voor dit kosteloos beschikbaar gestelde alles omvattende programma te gaan. Deze baan is echter wel wat complexer dus er zijn wat meer uurtjes in de opbouw van Koploper gaan zitten.
Als eerste is handmatig een schets gemaakt van de blokken en hun onderlinge verbindingen. Vervolgens is deze schets ingebracht in Koploper. Geleidelijk aan worden alle kenmerken van de blokken ingevoerd tegelijkertijd met het voortschrijden van de elektrische aansluitingen van de blokken. Als volgende stap is een grafische weergave van de baan gemaakt om de besturing door middel van Koploper mogelijk te maken. Daarna worden alle bezetmelders aan de blokken toegewezen.
In de loop der jaren is het baanoverzicht wat ruimer opgezet. De afstanden tussen de diverse stations is iets verruimd en door het beschikbaar komen van een grotere monitor kon het baanoverzicht ook wat groter opgezet worden.
Parallel63/Ontkoppel63/Decoder63
De aansturing van de wissels en de ontkoppelrails is gerealiseerd met de Parallel63 decoder van Kees Moerman (k.moerman@hccnet.nl), een perfect stukje werk en zonder problemen werkend te krijgen als je wat soldeerervaring en geduld hebt. Ik maak gebruik van drie verschillende printen: parallel63, decoder63 en ontkoppel24. De digitale voeding wordt verzorgd door een zelfgebouwde voeding van ~15V/160VA.
Voor de besturing van de seinen heb ik gekozen voor WMR63 (aangestuurd door Decoder63). Hiervoor heb ik bij Kees Moerman een extra Decoder63 print aangeschaft en een WMR63 print. Onderdelen besteld bij Conrad en de plaatselijke leverancier. Een paar uurtjes solderen et voila!
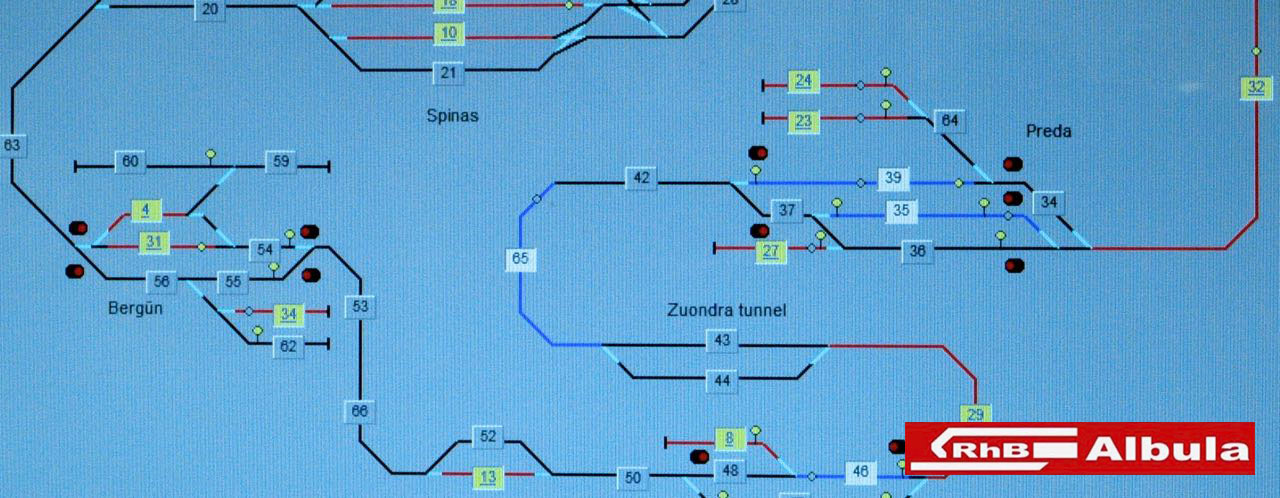
Het totaal overzicht van de besturing staat in het nevenstaande plaatje schematisch samengevat.
OC32 (OM32)
Nadat mijn oude desktop computer, die ik voor de baanbesturing gebruik, uiteindelijk na vele jaren de geest had gegeven, heb ik een nieuwe simpele custom-build desktop aangeschaft. Helaas is de parallelle poort van de huidige generatie moederboards niet gelijk aan de vroegere. Dus moest ik ook afscheid nemen van mijn Parallel63 kaart. In overleg met Kees Moerman ben ik overgestapt op een OC32 van Leon van Perlo, tegenwoordig te verkrijgen via PicommIT. Na het verhelpen van enige aanloop en afregel problemen, werkt deze kaart nu probleemloos in combinatie met de Intellibox en Koploper.
Overwegaansturing
Het heeft me heel wat hoofdbrekens gekost om de overwegen, zowel van Preda als Bergün goed aan te sturen via Koploper. Na wat speurtochten op het Koploperforum en het nauwkeurig lezen van de handleiding, ben ik er uiteindelijk toch in geslaagd om de overweg geheel naar mijn zin aan te sturen. Waar ik naar gestreefd heb is om als eerste het geluid van de bel te horen tegelijkertijd met het knipperen van de lichten van de Andreaskruizen, daarna sluiten de bomen en houdt het geluid op, terwijl de lichten blijven knipperen. Als dit allemaal achter de rug is, springt het betreffende sein op groen en kan de trein vertrekken. Als de trein de overweg gepasseerd is, springt eerst weer het sein op onveilig (=rood) waarna de bomen weer openen. Dit alles is tot stand gekomen door een combinatie van logische en speciale acties gecombineerd met de uitgebreide overweg. Ik heb het voorbeeld hier uitgewerkt voor een trein die van Bergün naar Muot vertrekt, maar vanzelfsprekend gaat het op dezelfde manier voor treinen die vanuit Muot komen of van en naar Preda rijden.
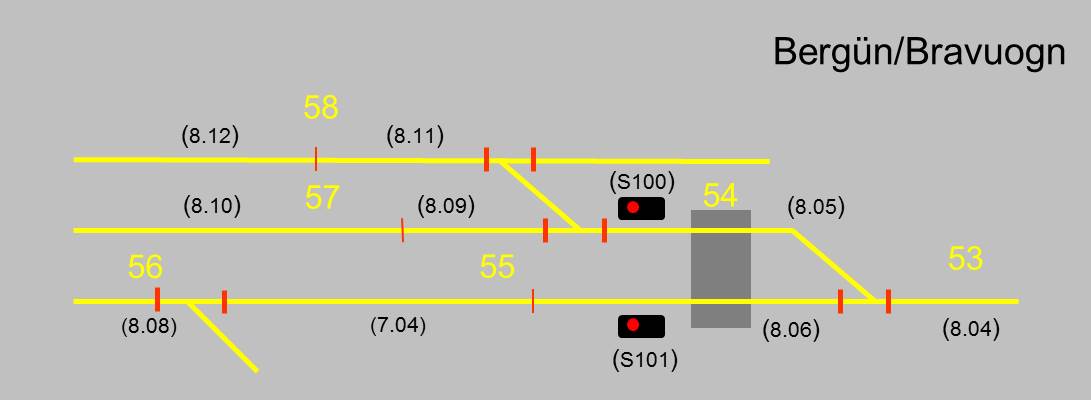
De situatie op het emplacement van Bergün is weergegeven in onderstaande figuur. De grijze rechthoek geeft schematisch de positie van de overweg weer. Als eerste heb ik een aantal logische acties gemaakt.
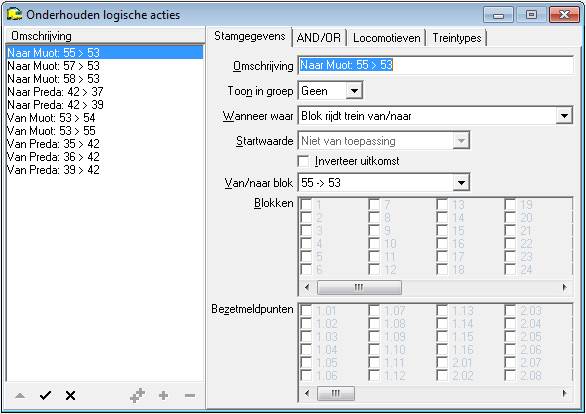
De logische acties zijn onderverdeeld in "Uit Muot" en "Naar Muot" en daarbij zijn alle mogelijke blok combinaties aangegeven van blokken waaruit de trein komt en naar toe kan rijden. Zoals uit onderstaande figuur blijkt vullen we bij "Wanneer/Waar" Blok trein rijdt van/naar in. En dan moet natuurlijk ook nog aangegeven worden over welke blokken het gaat; van blok 55 naar blok 53 in dit geval.
Totaal heb ik dus 10 van deze logische acties aangemaakt: twee vanuit Muot (53->54 en 53->55) en drie naar Muot (58->54, 57->54 en 55->53); twee naar Preda (42->39, 42->37) en drie vanuit Preda (35->37, 36->37, 39->42). De volgende stap is dan om een groot aantal speciale acties aan te maken. Deze acties beschrijf ik vanaf hier alleen voor de ritten van Bergün naar Muot. De andere instellingen gaan analoog aan deze en dat geeft verder geen problemen.
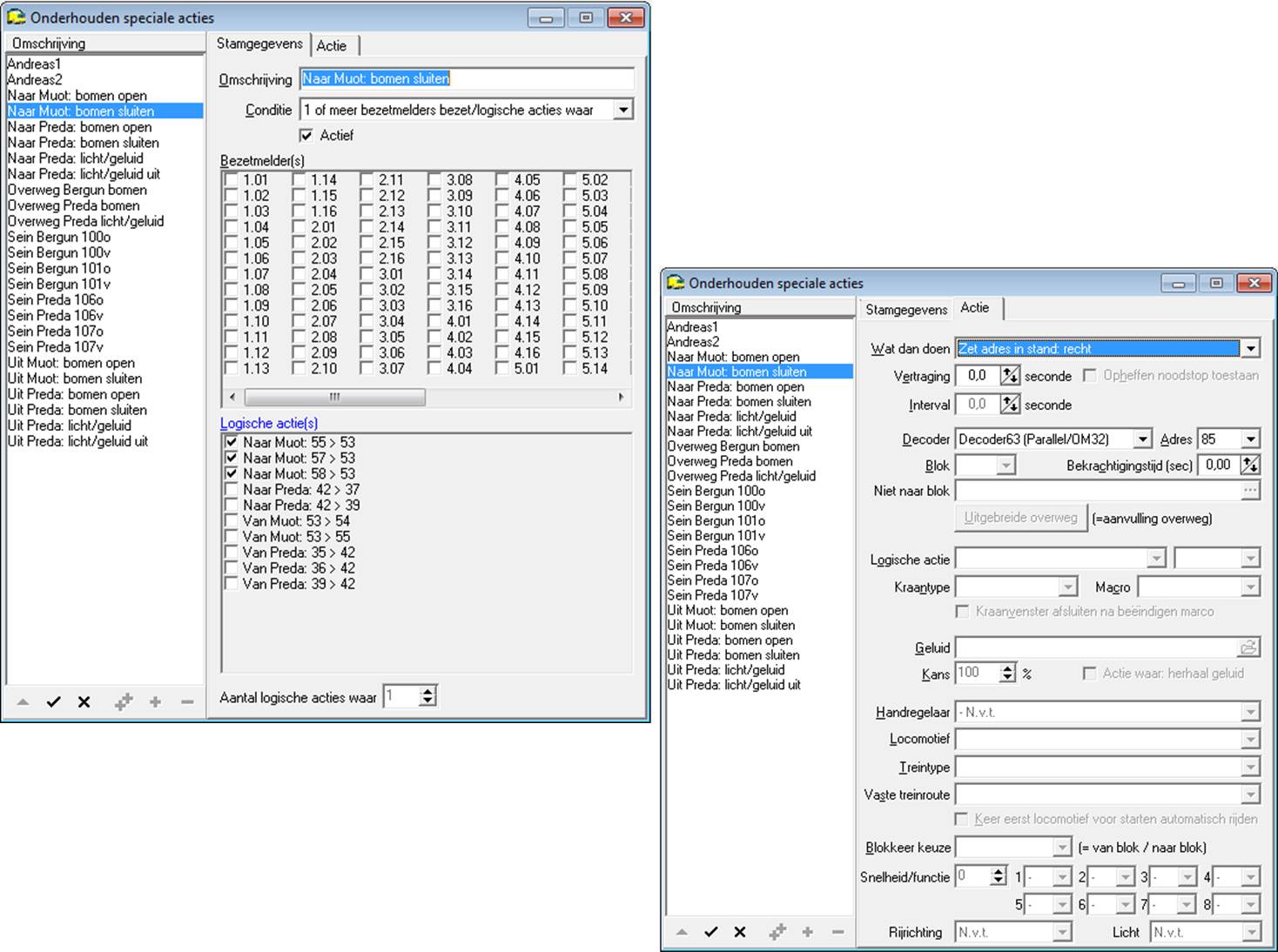
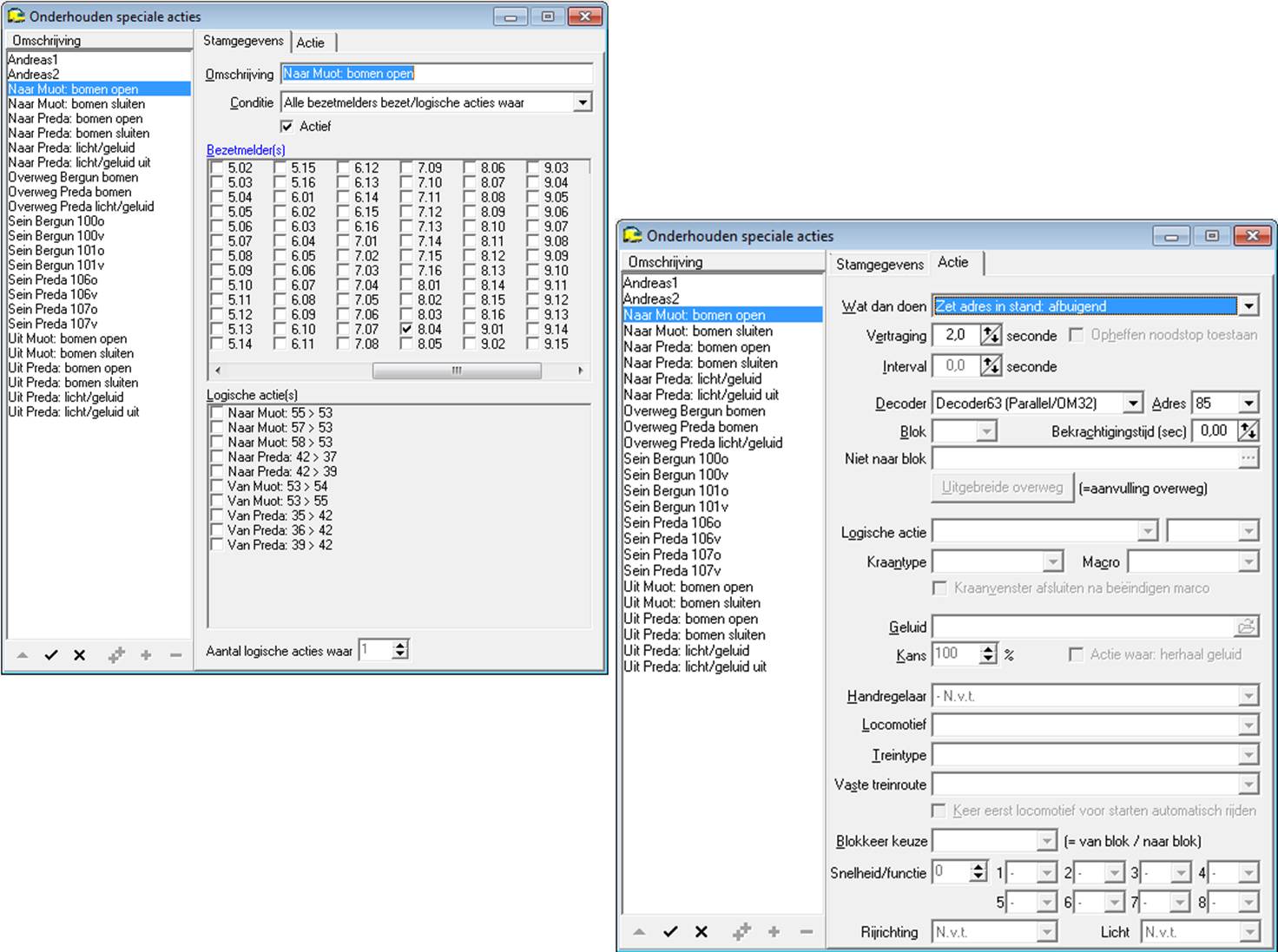
De eerste logische actie is het sluiten van de bomen. Als eerste worden de stamgegevens ingevuld. De actie heet: Naar Muot: bomen sluiten. Dan de conditie: 1 of meer bezetmelders bezet/logische acties waar. En tenslotte de drie logische acties die bij deze speciale actie horen (3 x naar Muot). Let goed op er worden hier geen bezetmelders aangevinkt. Het tweede tabblad, de actie, geeft aan welke wisseldecoder de overweg aanstuurt (85) en "zet adres in stand recht' is de actie die de bomen sluit. Verder is hier niets nodig. De screenprints van de twee tabbladen in Koploper staan in onderstaande figuur weergegeven.
Door deze eerste actie worden de bomen gesloten als de rijweg wordt ingesteld. Tezijnertijd moeten de bomen natuurlijk ook nog geopend worden. Daartoe dient de tweede speciale actie. Wat hier opvalt, is dat we geen logische acties meer gebruiken maar gebruik maken van het aanspreken van een bezetmelder. In dit geval de eerste bezetmelder van blok 53, Bm 8.04. De conditie is dan ook "Alle bezetmelders bezet/logische acties waar". De actie op het andere tabblad is dan vanzelfsprekend de omgekeerde actie van hierboven: "Zet adres in stand afbuigend". Om de trein iets meer tijd te gunnen om de overweg te passeren is hier een vertragingstijd van 2 sec ingesteld. Al doende moet deze waarde nauwkeuriger bepaald worden. De onderstaande screenprints geven de exacte lay-out van deze speciale actie weer.
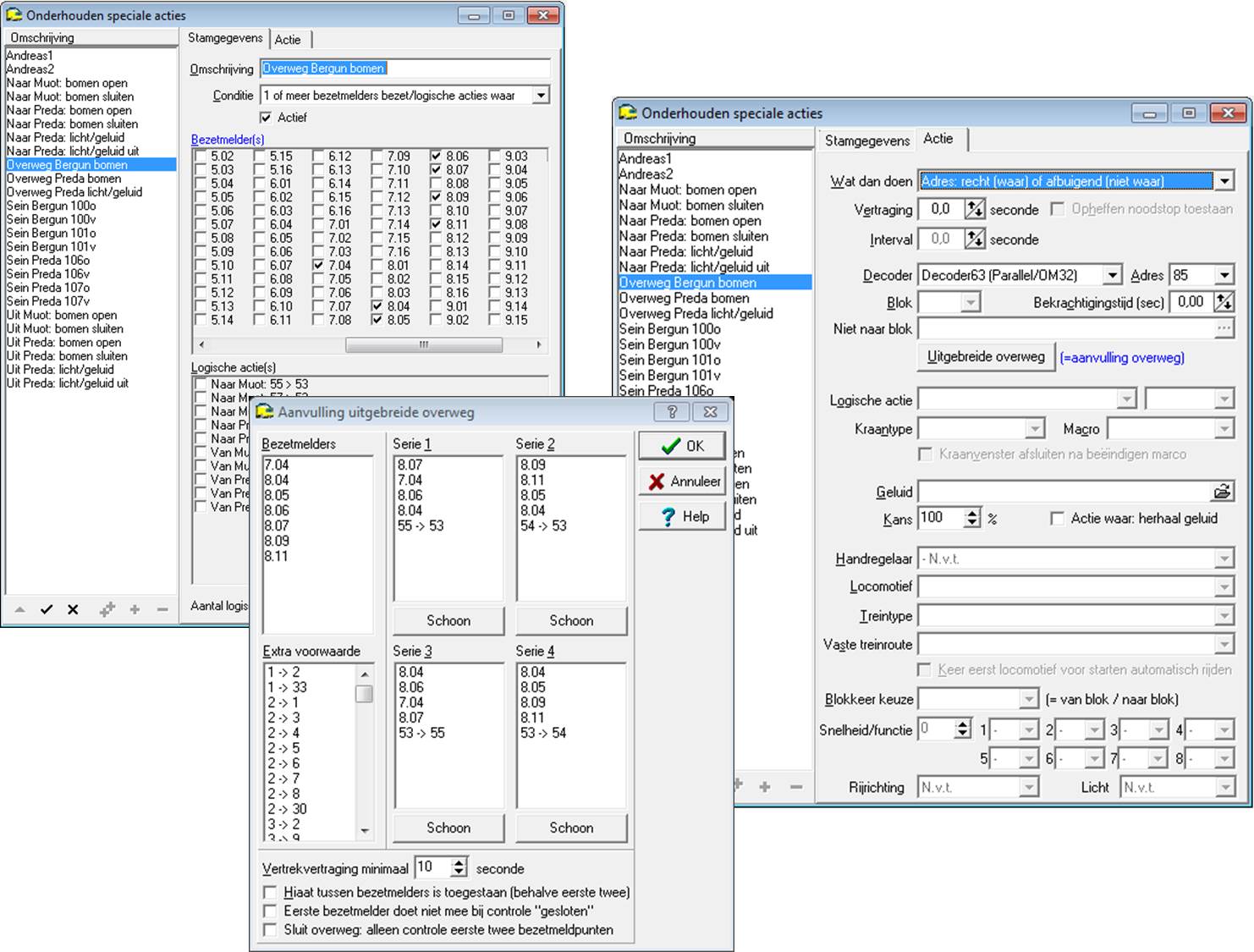
Nu de rijwegen bepaald zijn is er nog een speciale actie nodig om de overweg daadwerkelijk aan te sturen. Dit is de speciale actie: Overweg Bergün bomen. Hier worden alle bezetmelders die in het betreffende gebied liggen en meewerken aan de acties aangevinkt. De conditie wordt dan 1 of meer bezetmelders bezet en er worden hier geen logische acties aangevinkt. Op het tweede tabblad wordt bij "Wat dan doen" "Adres: recht (waar) of afbuigend (niet waar)" gekozen. Door deze keuze wordt de button Uitgebreide overweg zwart en kunnen we ook dat tabblad verder invullen. Hier worden de bezetmelders en de rijwegen van de 4 mogelijke opties in de juiste volgorde ingevuld. De drie tabbladen staan hieronder weergegeven.
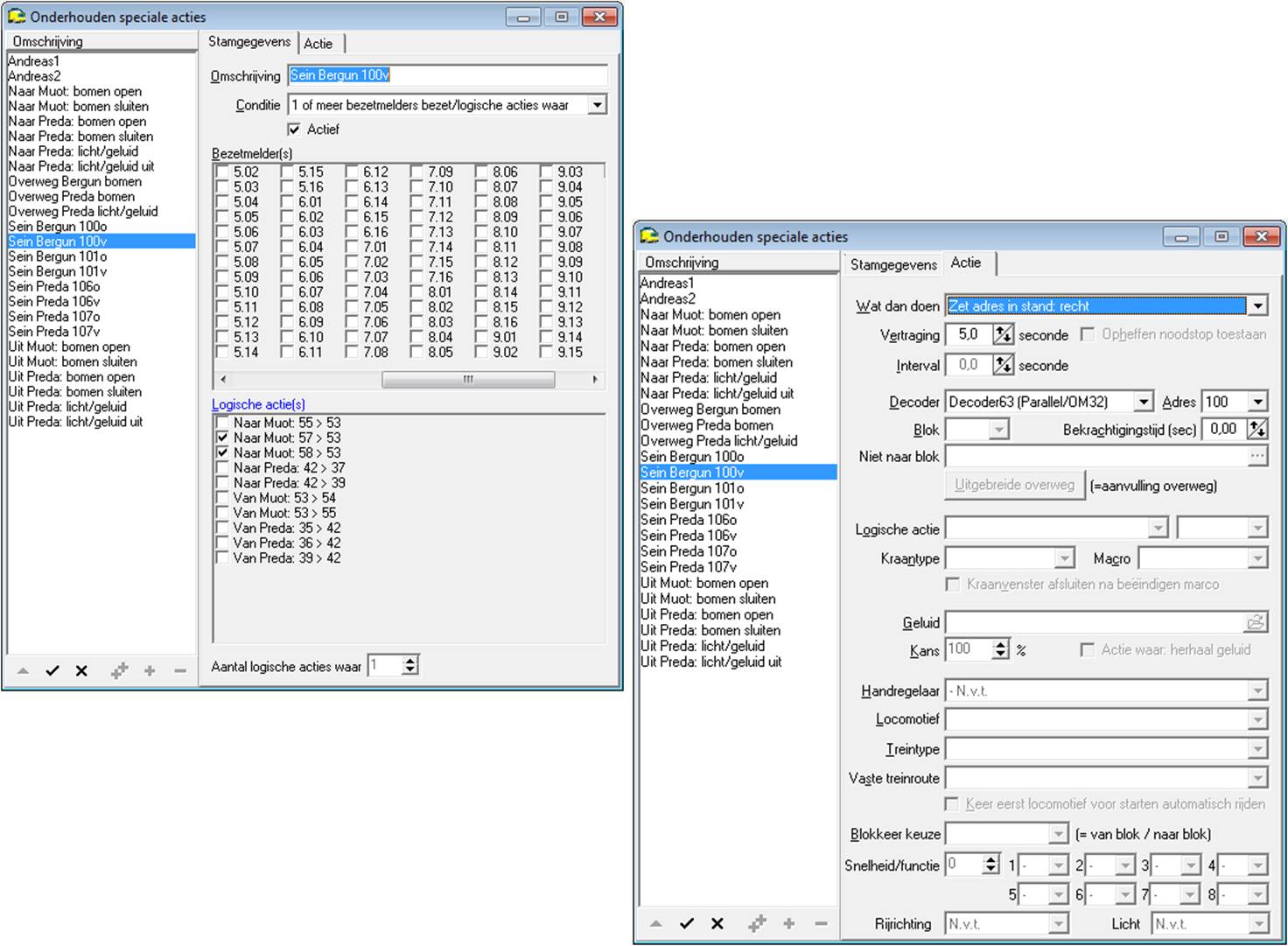
Nu resten ons nog twee speciale acties. Nadat de bomen gesloten zijn moet het sein 100 op veilig (=groen) gezet worden. Hiervoor moeten we even wachten tot de bomen daadwerkelijk gesloten zijn. Daarom wordt hier op het tweede tabblad een vertragingstijd van 5 seconden ingesteld. Het sein wordt geschakeld op basis van de logische acties en gaat om als een of meer logische acties waar zijn.
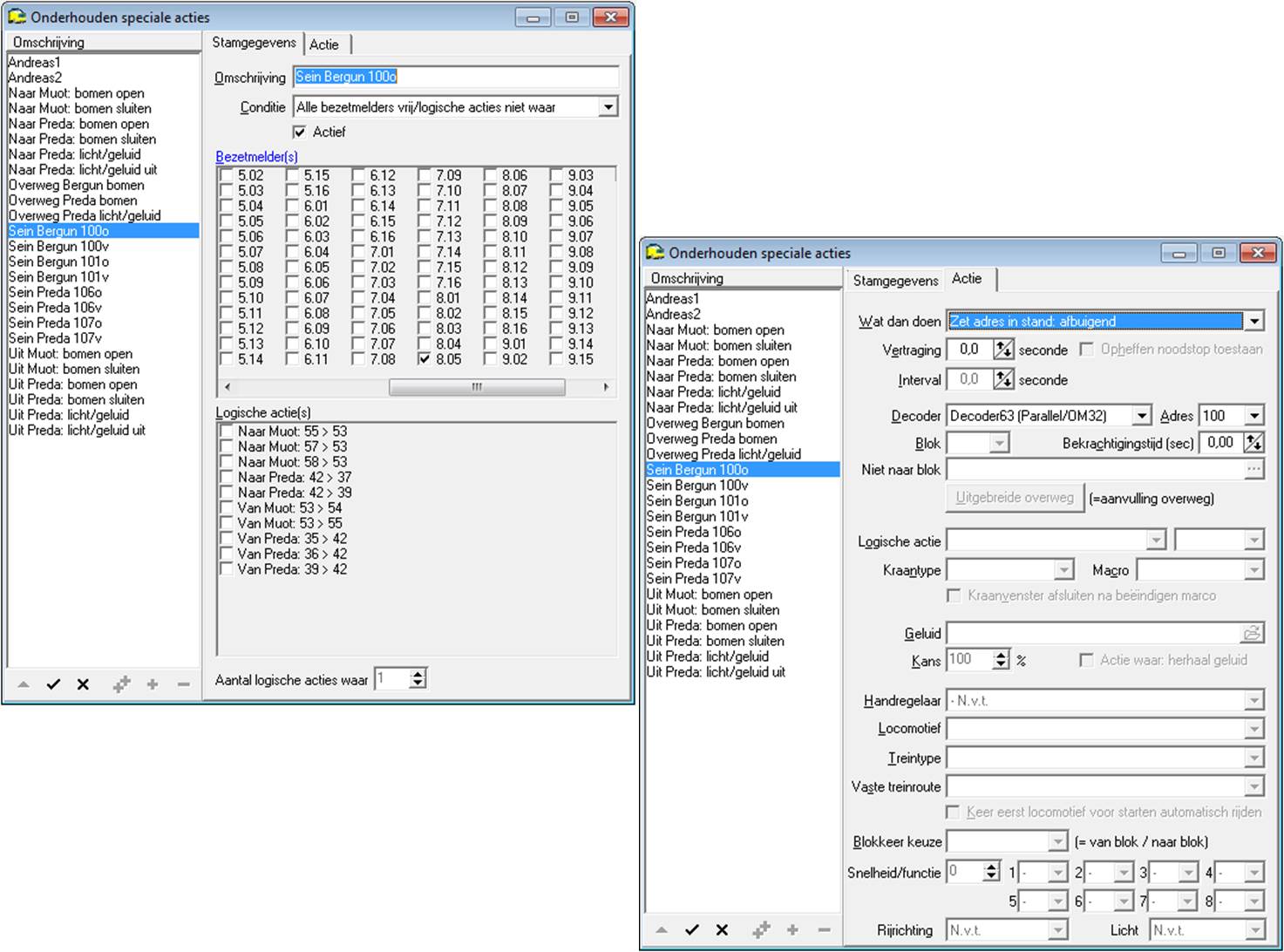
Het sein wordt uiteindelijk weer op onveilig gezet als de trein de overweg gepasseerd is en voordat de bomen geopend worden. Het onveilig zetten van het sein gebeurt op basis van een vrijgegeven bezetmelder, in dit geval Bm 8.05. De wisseldecoder wordt dan in de stand afbuigend gezet, waardoor het sein weer op rood springt. In het eerste tabblad alleen de bezetmelder, verder geen logische acties.
Zoals al eerder gemeld, de andere logische en speciale acties gaan op dezelfde manier. Goed blijven nagaan of de volgorde van de bezetmelders de juiste is en helder en gestructureerd blijven denken. Dan komt het uiteindelijk allemaal voor elkaar. Het nauwkeurig afstemmen van de vertragingstijden is iets wat met behulp van langere treinen nog een keer overgedaan moet worden, om er echt voor te zorgen dat de overweg vrij is voordat de bomen open gaan. Ik zal op termijn ook al mijn personenwagens van detectie gaan voorzien, zodat de gehele operatie nauwkeuriger, realistischer en waarheidsgetrouwer wordt.
MARDEC - Multifunctionele ARduino Decoder
Een artikel in RailHobby (381 (2016) 24-27) trok mijn aandacht. Ik had de discussie op het BeneluxSpoor forum wel gezien, maar niet echt gevolgd. Wel had ik al bedacht dat het misschien een goed idee zou zijn om op termijn eens iets met een Arduino op te zetten. Dus dit werd het moment.
Naar aanleiding van het artikel twee MARDEC printplaten besteld met hun componenten. Dat kost bijn niets. Een volledige print inclusief verzendkosten voor 5 Euro. Gelukkig kon ik de opengevallen plaats innemen van iemand die een bestelling had geannuleerd in de eerste batch. De printen komen met een duidelijke handleiding en de software kan gedownload worden van het internet via het BeneluxSpoor forum.
De handleiding voor de bestukking en volgorde van bouwen is absoluut fool-proof. Daar kan menig fabrikant nog een puntje aan zuigen. Zodra de beide MARDEC prints klaar zijn, kunnen ze op de Arduino Uno gemonteerd worden.
Daaraan voorafgaand moet eerst de Arduino natuurlijk aan de computer aangesloten worden. De Arduino kan geconfigureerd en gevoed worden vanuit de USB aansluiting, maar beter is het ook een aparte voeding van 12 DC aan te sluiten anders belast je de computervoeding wellicht te zwaar. Deze voeding deel ik met een back-up schijf die ik slechts af en toe gebruik.
Na aansluiten volgt de installatie van de software. Hiervoor wordt een aparte handleiding meegeleverd via het forum. Deze handleiding is iets minder nauwkeurig (de titels voor programma's in de handleiding zijn niet exact hetzelfde als in de zip-file), maar wijst zich verder wel vanzelf en in mijn geval verliep de installatie zonder enig probleem. Ook gegeven het feit dat ik Chinese Arduino's besteld heb. De tweede stap is dan vervolgens de configuratie files voor de MARDEC te laden. Ook dit verliep probleemloos. En dan kan het experimenteren beginnen.
Voor dit deel van onze onderneming is ook een aparte handleiding: MARDEC II Manual. Deze gebruiksaanwijzing leid je stap voor stap door de aansturing van de servo's, om daar maar mee te beginnen. De servo's die ik heb besteld zijn Tower Pro SG92R. Deze zijn heel klein, 23 x 12 x 32 mm. Voorlopig heb ik een montagehulpje van MDF gemaakt. Op termijn ga ik mogelijk een 3D geprint ontwerpje hiervoor maken zoals Huib Maaskant dat gedaan heeft voor zijn servo's.
Naar het voorbeeld van Huib Maaskant heb ik een montagesteun voor mijn servo's ontworpen. Ik gebruik mini-servo's dus ik moest iets nieuws maken. Heb wel eerst de Shapeways website afgestruind om te zien of er al iets was, maar dat heb ik niet kunnen vinden. Dus zelf aan de slag met 123D Design. Dat gaat eigenlijk best goed. Een avondje prutsen en ik had mijn eerste 3D ontwerp voor elkaar. Via het programma kan je het gelijk doorsturen naar Shapeways, dus dat was super makkelijk. De reactie van Shapeways was voortvarend. Binnen een dag was het in productie. En met 5 dagen werd het afgeleverd.
De servo gemonteerd, aangestuurd via de MARDEC en bestuurd door Koploper. Het werkte in een keer. De eerste servo heb ik gebruikt om een onwillige wissel, waar ik eerder over gesproken heb, aan te drijven. Die gaat nu moeiteloos en mooi langzaam om. Op zoek naar de volgende toepassingen. Maar eerst hierbij wat foto's.
De bestellingen uit China zijn goedkoop, maar komen zonder enige handleiding of uitleg. Dus die heb ik vervolgens op internet gevonden. Servo aansluitingen: oranje draad = puls, rood = +5V DC en bruin = aarde. Alles is te vinden, maar je moet er wel even achteraan.
De servo's heb ik onder een tijdelijke opstelling gehangen om er mee te kunnen experimenteren, zonder me in allerlei bochten te hoeven wringen. De opstelling heb ik eerder gebouwd om de aansturing met geheugen draad uit te proberen. Dat principe heb ik losgelaten omdat ik de aansluitingen van het draad onvoldoende reproduceerbaar kreeg. Nu is het een goed hulpmiddel. Bovenop twee overwegbomen en de servo's eronder. Van de servo loopt een draadje van verenstaaal naar de slagboom. De servo wordt in hoogste en laagste positie geplaatst met het configuratie programma en die positie kan per graad bijgesteld worden. Eerst voor pin 3 en dan voor pin 5 (willekeurig gekozen aansluitpunten voor servo 1 en servo 2). Minimumsnelheid van de servo is 50 msec/graad. En dat geeft een redelijk realistisch beeld. In de video staat de servosnelheid nog op 5 msec/graad.
De laatste stap die nog genomen moest worden is aansturing via Koploper. In principe is de MARDEC een gewone DCC decoder, maar die had in nog nooit gebruikt. Zoals u elders hebt kunnen lezen wordt mijn hele baan door Decoder63's aangestuurd. Dus dat was even wennen. Als eerste heb ik in de Intellibox DCC als wisselprotocol gekozen. Daarmee kon ik al via de Intellibox een DCC adres kiezen en kon ik zien dat de Arduino/MARDEC combinatie hier op reageert (oranje LED licht op). Daarna heb ik een wissel gekozen in Koploper (had ook een schakelaar kunnen zijn) om de servo's aan te sturen. Dit met name omdat ik ook het plan nog heb om twee moeilijke wissels via servo's aan te gaan sturen. Door deze twee wissels via de wisseldecoder aan te sturen op adres 3 en 5 (de willekeurig gekozen pinnen op de MARDEC) bestuurt Koploper uiteindelijk de overweg. Missie geslaagd. Dat het werkt, laat bijgaande video zien.
Het volgende project wordt het schakelen van apparatuur met behulp van de reeds aangeschafte 2-kanaals relais prints. Binnenkort meer hierover.
Camerabewaking
De monitoring van de schaduwstations wordt door middel van webcams (5 D-Link DLC930LB1 cameras) geregeld. Hiertoe heb ik een extra VGA kaart in mijn computer geplaatst, waardoor ik in staat ben om een tweede monitor aan te sluiten. Met alle camera's nu bedraad is de ondergrondse treinactiviteit nu goed te volgen vanaf de plaats van de treindienstleider. Op bijgaande foto een overzicht van baan en bedieningslocatie zoals het er nu bij staat.
De zesde camera is de camera aan boord van een van de treinen, die via een draadloze verbinding loopt. Deze camera geeft het gezichtspunt van de machinist en wordt groter weergegeven. Met een overzicht kan ik nu alle plekken op de baan in de gaten houden. Het heeft even wat uitzoek werk gekost, maar nu heb ik een overzichtelijk en gebruiksvriendelijk systeem.
Via het WiFi netwerk bleken de camera's toch wat langzaam en onbetrouwbaar. Na overleg met mijn computerleverancier toch maar besloten de camera's via CAT5 kabels aan te sluiten. Dus een extra switch aangeschaft en een aantal lengtes kabel. Een middagje op mijn rug onder de baan en nu draait alles echt zonder problemen. Voor het overzicht gebruik ik D-CamView (door D-Link meegeleverd). Nu de camera's bekabeld zijn, werkt dat perfect.De treinen zijn nu echt real-time te volgen. Geen vastlopers meer en een betrouwbare operatie. Op één scherm koploper, op het andere scherm de 6 camera's. Zo had ik het altijd al voor ogen.
Op het scherm ziet u van boven naar beneden en van links naar recht: het beeld van de machinist, het schaduwstation Filisur, de oprit naar Bergün, het schaduwstation Spinas, de keerlus en het schaduwstation Stuls.
Bedrading
Tussen kerst en oud en nieuw 2016 een start gemaakt met het vervangen, verbeteren en verfraaien van de ondergrondse bedrading. Hiervoor heb ik in totaal 12 meter kabelgoot aangeschaft (van 32 x 32 mm) bij Conrad en een 500-tal tiewraps met label. Tevens heb ik bij verschillende leveranciers rollen van 100 meter montagedraad aangeschaft van 0.44 mm2 en 0.5 mm2, in de kleuren zwart, wit, geel, rood, blauw, groen, bruin, oranje en grijs.
Als eerste ben ik begonnen om de montagedraden onder de tafel beter te identificeren. Met behulp van de tiewraps en een permanente marker, heb ik alle kabels naar de diverse decoders gemarkeerd.
Na een hele dag hard werken heb ik de OC32 en een van de Decoder63 prints opnieuw geplaatst en bedraad. Bijgaande foto's tonen het nog voorlopige resultaat. Zoals duidelijk te zien is, is nog niet alle bedrading weggewerkt.
Na twee hele dagen hard doorwerken is een van de 5 tafels vrijwel klaar. Ik moet nog even bedenken wat ik met de bezetmelders ga doen.
Bij deze hele opschoon actie hoort ook het aanpassen van alle aansluitkabels, voornamelijk door in te korten, daarmee raak ik dan een groot deel van de dradenwarboel kwijt. Ook weer eens iets nieuws geprobeerd: het inkorten van een Cat.5 kabel en het aansluiten van een RJ45 stekker. Met enige trots kan ik vertellen dat het gelukt is. Bij de verbetering van de bedrading heb ik ook op twee plaatsen een losse 5V 4A voeding geplaatst. Deze voedingen zijn om in de toekomst meer servo's te kunnen aansluiten.
Remproces
Het remproces in Koploper vergt toch nog wel wat extra aandacht. Ik ben nu in het stadium gekomen dat ik echt alles op de juiste plaats wil laten stoppen. Een trein half naast een perron is geen gezicht, daar zal iedereen het mee eens zijn. Dus om dat goed voor elkaar te krijgen zonder al te veel pogingen, heb ik me toch maar eens verdiept in het remproces.
De blokken waar dit met name van belang is zijn de perronsporen. Het gaat dan om de blokken 58, 57 en 55 van Bergün, 36, 35 en 39 van Preda en 46 en 47 van Muot. Daar moet ik mijn zaakjes dus goed voor elkaar krijgen. In de tabel rechts staan de blokken met hun bijbehorende bloklengtes vermeld. Het kortste blok is blok 58 met een lengte van 58 cm. Daar moet dus de vertraging op gekozen worden. In de handleiding van Koploper wordt op pagina 348 het remproces nader toegelicht. Deze aanpak hanteer ik ook bij deze uitleg. Twee parameters zijn verder van belang: i) de snelheid bij binnenkomst van het blok en ii) de gemiddelde snelheid in het blok. De hoogste van de twee wordt gebruikt om de blokdoorlooptijd te berekenen.
De Allegra's, de pendeltreinen op mijn baan, rijden met een schaalsnelheid van 80 km/uur. Om het remmen realistisch te laten verlopen verlaag ik al in het laatste blok voor de stations de snelheid naar 60 km/uur. Daarmee komt het gedrag van de verschillende treintypes dichter bij elkaar in de buurt. Omgerekend is dat 10.4 cm/s. Hiertoe druk je de snelheid eerst uit in cm/uur. Vervolgens deel je dit door 3600 om de snelheid in cm/s te krijgen en dat getal deel je tenslotte nog door 160 om de schaalsnelheid in N in cm/s te verkrijgen.
Met de hoogste van de twee snelheden, gemiddeld of binnenkomst, bereken je dan vervolgens de doorlooptijd van dit blok. Vervolgens is de benodigde vertragingstijd om van 50 naar 0 km/uur te gaan ongeveer de helft van de doorlooptijd. In beide gevallen komt dit uit op 3 sec. Deze drie seconden wordt ingevoerd als vertragingstijd voor de pendeltrein en de Ge4/4's. Voor langere blokken, waar de treinen dus te vroeg zouden stoppen, wordt dit verschil in afgelegde afstand gecompenseerd door een extra uitlooptijd in te voeren. Deze extra afstand varieert van 5 cm (blok 36) tot 25 cm (blok 39) en alles er tussen in voor de overige blokken.
De minimumsnelheid heb ik niet volgens nevenstaande tabellen ingevoerd, maar op basis van ervaring en het rijgedrag van de specifieke locomotieven bij lage snelheden. Voor de pendeltreinen wordt dit 20 km/uur en voor de Ge4/4's 30 km/uur.